1970/80 “GA is a robust method”
1970 + ESs self-adapt mutation step size σ
1986 meta-GA for optimizing GA parameters
1990 EP adopts self-adaptation of σ as ‘standard’
1990 some papers on changing parameters on-the-fly
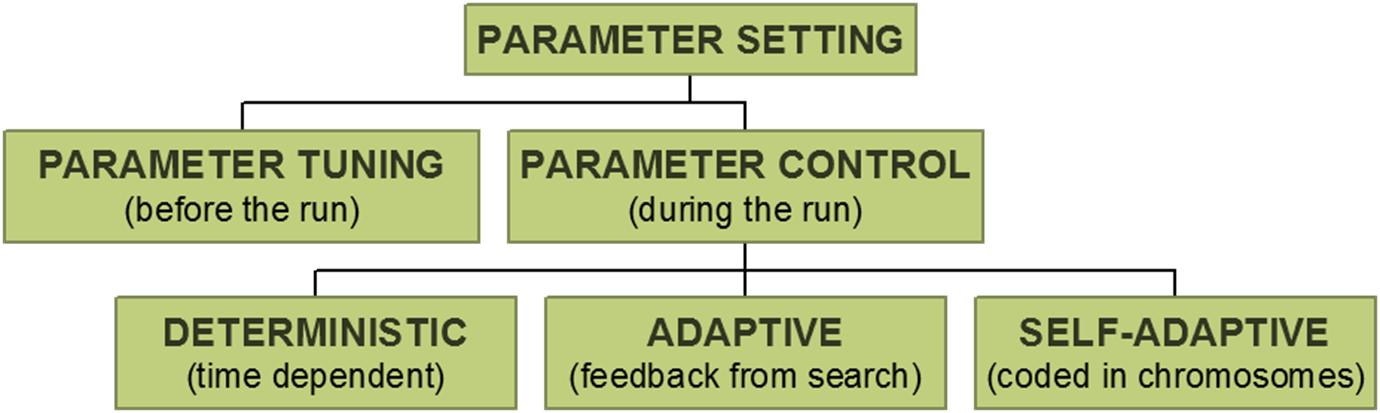
1999 Eiben-Michalewicz-Hinterding paper proposes clear taxonomy and
terminology
Parameter tuning : testing and comparing different
values before the “real” run
Problems:
users mistakes in settings can be sources of errors or sub-optimal
performance
costs much time
parameters interact: exhaustive search is not practicable
good values may become bad during the run
1.5 Parameter control
Parameter control: setting values on-line, during the
actual run, e.g.
predetermined time-varying schedule p = p(t)
using (heuristic) feedback from the search process
encoding parameters in chromosomes and rely on natural
selection
Problems:
finding optimal p is hard, finding optimal p(t) is harder
still user-defined feedback mechanism, how to “optimize”?
when would natural selection work for algorithm parameters?
1.6 Notes on parameter control
Parameter control offers the possibility to use appropriate values in
various stages of the search.
Adaptive and self-adaptive control can “liberate” users from
tuning,
reduces need for EA expertise for a new application.
Assumption: control heuristic is less parameter-sensitive than the
EA.
BUT
State-of-the-art is a mess:
literature is a heterogeneous, no generic knowledge,
no principled approaches to developing control heuristics (deterministic
or adaptive),
no solid testing methodology
WHAT ABOUT AUTOMATED TUNING?
1.7 Historical account
(cont’d)
Last decade:
More & more work on parameter control
Traditional parameters: mutation and xover
Non-traditional parameters: selection and population size
All parameters vs. “parameterless” EAs
Not much work on parameter tuning, i.e.,
Nobody reports on tuning efforts behind their EA published
A handful papers on tuning methods / algorithms
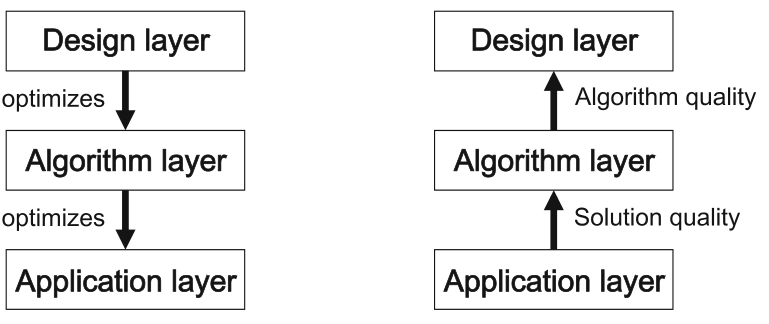
1.8 Control and information flow of
EA calibration / design
The whole field of EC is about this
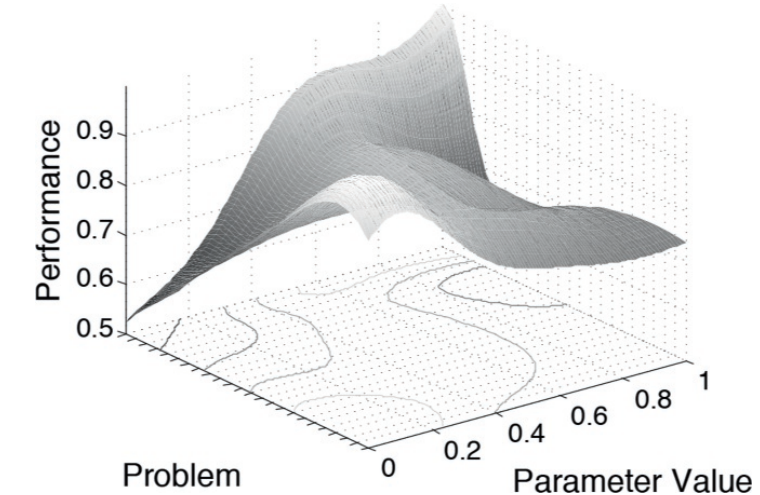
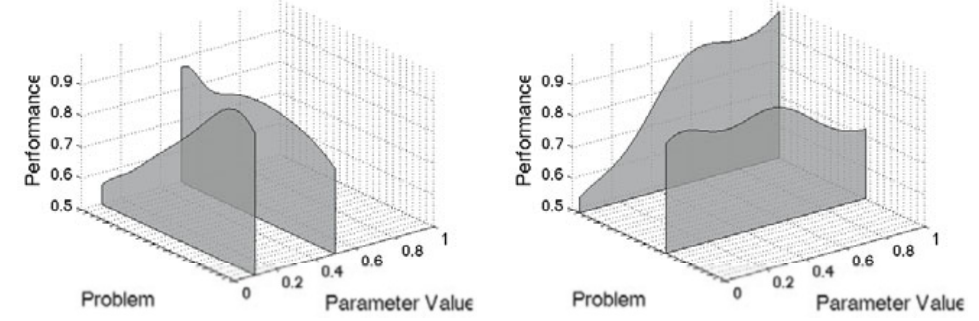
1.9 Parameter – performance
landscape
All parameters together span a (search) space.
One point <–> one EA instance.
Height of point = performance of EA instance on a given
problem.
Parameter-performance landscape or utility landscape for each { EA +
problem instance + performance measure }.
This landscape is unlikely to be trivial, e.g., unimodal,
separable.
If there is some structure in the utility landscape, then we can do
better than random or exhaustive search.
1.10 Ontology - Terminology
LOWER PART
UPPER PART
METHOD
EA
Tuner
SEARCH SPACE
Solution vectors
Parameter vectors
QUALITY
Fitness
Utility
ASSESSMENT
Evaluation
Test
Fitness ≈ objective function value
Utility = ?
Mean Best Fitness
Average number of Evaluations to Solution
Success Rate
Robustness, …
Combination of some of these
1.11 Off-line vs. on-line
calibration / design
Design / calibration method
Off-line - parameter tuning
On-line - parameter control
Advantages of tuning
Easier
Most immediate need of users
Control strategies have parameters too - need tuning themselves
Knowledge about tuning (utility landscapes) can help the design of
good control strategies
There are indications that good tuning works better than
control
1.12 Tuning by
generate-and-test
EA tuning is a search problem itself.
Straightforward approach: generate-and-test
1.13 Testing parameter vectors
Run EA with these parameters on the given problem or problems
Record EA performance in that run e.g., by
Solution quality = best fitness at termination
Speed ≈ time used to find required solution quality
EAs are stochastic - repetitions are needed for reliable evaluation
- we get statistics, e.g.,
Average performance by solution quality, speed (MBF, AES, AEB)
Success rate = % runs ending with success
Robustness = variance in those averages over different problems
Big issue: how many repetitions of the test?
1.14 Numeric parameters
E.g., population size, xover rate, tournament size, …
Domain is subset of R, Z, N (finite or infinite)
Sensible distance metric - not all are searchable
1.15 Symbolic parameters
E.g., xover_operator, elitism, selection_method
Finite domain, e.g., {1-point, uniform, averaging}, {Y, N}
No sensible distance metric - non-searchable, must be sampled
Searchable ordering
Non-searchable ordering
1.16 Notes on parameters
A value of a symbolic parameter can introduce a numeric parameter,
e.g.,
Selection = tournament - tournament size
Populations_type = overlapping - generation gap
Parameters can have a hierarchical, nested structure
Number of EA parameters is not defined in general
Cannot simply denote the design space / tuning search space by
S = Q1 x … Qm x R1 x … x Rn
with Qi / Rj as domains of the symbolic/numeric parameters
1.17 What is an EA? (1/2)
ALG-1
ALG-2
ALG-3
ALG-4
SYMBOLIC PARAMETERS
Representation
Bit-string
Bit-string
Real-valued
Real-valued
Overlapping pops
N
Y
Y
Y
Survivor selection
̶
Tournament
Replace worst
Replace worst
Parent selection
Roulette wheel
Uniform determ
Tournament
Tournament
Mutation
Bit-flip
Bit-flip
N(0,σ)
N(0,σ)
Recombination
Uniform xover
Uniform xover
Discrete recomb
Discrete recomb
NUMERIC PARAMETERS
Generation gap
̶
0.5
0.9
0.9
Population size
100
500
100
300
Tournament size
̶
2
3
30
Mutation rate
0.01
0.1
̶
̶
Mutation stepsize
̶
̶
0.01
0.05
Crossover rate
0.8
0.7
1
0.8
Make a principal distinction between EAs and EA instances and place
the border between them by:
Option 1
There is only one EA, the generic EA scheme
Previous table contains 1 EA and 4 EA-instances
Option 2
An EA = particular configuration of the symbolic parameters
Previous table contains 3 EAs, with 2 instances for one of them
Option 3
An EA = particular configuration of parameters
Notions of EA and EA-instance coincide
Previous table contains 4 EAs / 4 EA-instances
1.18 Generate-and-test under the
hood
1.19 Tuning effort
Total amount of computational work is determined by
A = number of vectors tested
B = number of tests per vector
C = number of fitness evaluations per test
Tuning methods can be positioned by their rationale:
To optimize A (iterative search)
To optimize B (multi-stage search)
To optimize A and B (combination)
To optimize C (non-existent)
…
1.20 Optimize A = optimally use
A
Applicable only to numeric parameters
Number of tested vectors not fixed, A is the maximum (stop
cond.)
Population-based search:
Initialize with N << A vectors and
Iterate: generating, testing, selecting p.v.’s
Meta-EA (Greffenstette ’86)
Generate: usual crossover and mutation of p.v.’s
SPO (Bartz-Beielstein et al. ’05)
Generate: uniform random sampling !!! of p.v.’s
REVAC (Nannen & Eiben ’06)
Generate: usual crossover and distribution-based mutation of
p.v.’s
1.21 Optimize B = reduce B
Applicable to symbolic and numeric parameters
Number of tested vectors (A) fixed at initialization
Set of tested vectors can be created by
regular method - grid search
random method - random sampling
exhaustive method - enumeration
Complete testing (single stage) vs. selective testing (multi-stage)
Complete testing: nr. of tests per vector = B (thus, not
optimizing)
Selective testing: nr. of tests per vector varies, ≤ B
Idea:
Execute tests in a breadth-first fashion (stages),
all vectors X < B times
Stop testing vectors with statistically significant poorer
utility
Well-known methods
ANOVA (Scheffer ’89)
Racing (Maron & Moore ’97)
1.22 Optimize A & B
Existing work:
Meta-EA with racing (Yuan & Gallagher ’04)
New trick: sharpening (Smit & Eiben 2009)
Idea: test vectors X < B times and increase X over time during the
run of a population-based tuner
Newest method: REVAC with racing & sharpening = REVAC++
1.23 Which tuning method?
Differences between tuning algorithms
Maximum utility reached
Computational costs
Number of their own parameters – overhead costs
Insights offered about EA parameters (probability distribution,
interactions, relevance, explicit model…)
EA as is (accidental parameters)
EA as it can be (“optimal” parameters)
1.27 Recommendations
DO TUNE your evolutionary algorithm.
Think of the magic constants.
Decide: speed or solution quality?
Decide: specialist of generalist EA?
Measure and report tuning effort.
Try old toolbox: http://sourceforge.net/projects/mobat
1.28 Example study ‘Best
parameters’
Setup:
Problem: Sphere Function
EA: defined by Tournament Parent Selection, Random Uniform Survivor
Selection, Uniform Crossover, BitFlip Mutation
Tuner: REVAC spending X units of tuning effort, tuning for
speed
A = 1000, B = 30, C = 10000
Results: the best EA had the following parameter values
Population Size: 6
Tournament Size: 4
…
Conclusions: for this problem we need a high (parent) selection
pressure. This is probably because the problem is unimodal.
1.29 Example study ‘Good
parameters’
Setup: same as before
Results: The 25 best parameters vectors have their values within the
following ranges
Mutation Rate: [0.01, 0.011]
Crossover Rate: [0.2, 1.0]
(..)
Conclusions: for this problem the mutation rate is much more
relevant than the crossover rate.
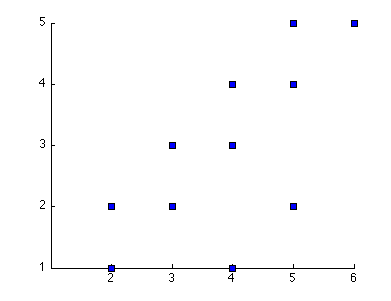
1.30 Example study
‘interactions’
Setup: same as before.
Results: plotting the population size and generation gap of the best
parameter vectors shows the following
Conclusions: for this problem the best results are obtained when
(almost) the complete population is replaced every generation.
1.31 The (near) future of automated
tuning
Hybrid methods for A & B
Well-funded EA performance measures, multi-objective formulation -
multi-objective tuner algorithms
(Statistical) models of the utility landscape: more knowledge about
parameters
Open source toolboxes
Distributed execution
Good testbeds
Adoption by the EC community
Rollout to other heuristic methods with parameters
1.32 Culture change?
Fast and good tuning can lead to new attitude
Past & present: robust EAs preferred
Future: problem-specific EAs preferred
Old question: what is better the GA or the ES?
New question: what symbolic configuration is best?
… given a maximum effort for tuning
New attitude / practice:
tuning efforts are measured and reported
EAs with their practical best settings are compared, instead of
unmotivated “magical”settings